
01
Fragmented Systems
When environments and devices change, building separate systems fragments data and operational processes.
CoWorld connects robots and diverse devices across maritime, land, and air environments
into a unified operational structure,
where each Device Agent collaborates on shared goals and field information.
Traditional unmanned systems are often built separately per device, manufacturer, or environment.
Adding devices increases complexity, fragments data, and raises operational costs.
When environments and devices change, building separate systems fragments data and operational processes.

When communication fails or unexpected situations arise, human intervention is required and operators must remain on-site at all times.

As the number of devices grows and the operating area expands, it becomes difficult for people to directly monitor every status and manage each device.
Each device has a Device Agent that understands its own resources. Each Agent determines mission feasibility based on status, position, and battery. When needed, the Central Control Agent analyzes the overall situation and manages the mission.
Detect changes in field conditions and device state
Assess the response using current state and policies
Assess feasibility using each Device Agent's state and capabilities
Each Agent executes the tasks it has determined
Connect decisions, commands, and outcomes to the next assessment
Manage connectivity, position, battery, and capabilities for different robots and sensors in one structure.
Detect changes in the environment and device state, then surface situations that require attention.
Build the necessary tasks and execution order from the operational goal and current situation.
Each Device Agent checks its state and capabilities to assess mission feasibility and determine the necessary tasks.
Agents operate within defined authority and policy, with human intervention available for critical actions.
Connect rationale, commands, and outcomes for later review and future response.
CoWorld runs every task through a verify → execute → monitor loop. It checks feasibility before acting, keeps watching while acting, and when a situation is uncertain or risky it stops and hands control back to you.
Before acting, confirm it can be done.
While acting, keep watching.
Verify → Execute → Monitor runs as one continuous loop; when an anomaly appears, it pauses and verifies again.
It never guesses — it asks you for the area or coordinates it needs.
It decides whether to continue, stop safely, wait, or return — within set policy.
Plan approval, device selection, and other critical calls require a human.
Every decision, command, and result is recorded so you can trace who did what and why.

Connect different robots and devices to a common operating flow that scales as field environments and device configurations change.
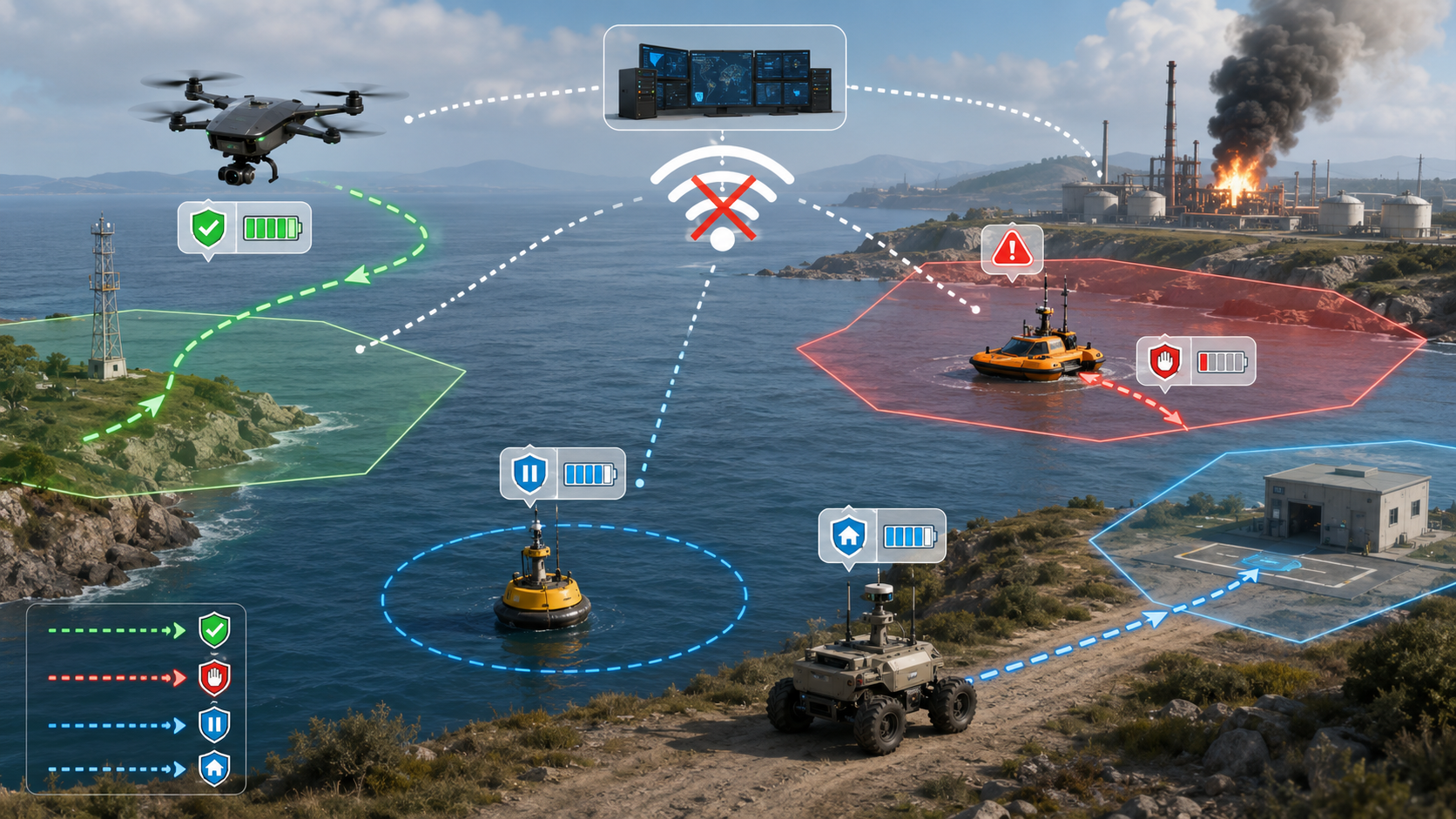
During disconnections and unexpected events, Agents use available information and operating policies to decide whether to continue, stop safely, wait, or return.

Share device, mission, and anomaly state so Agents and operators understand the same operational situation.
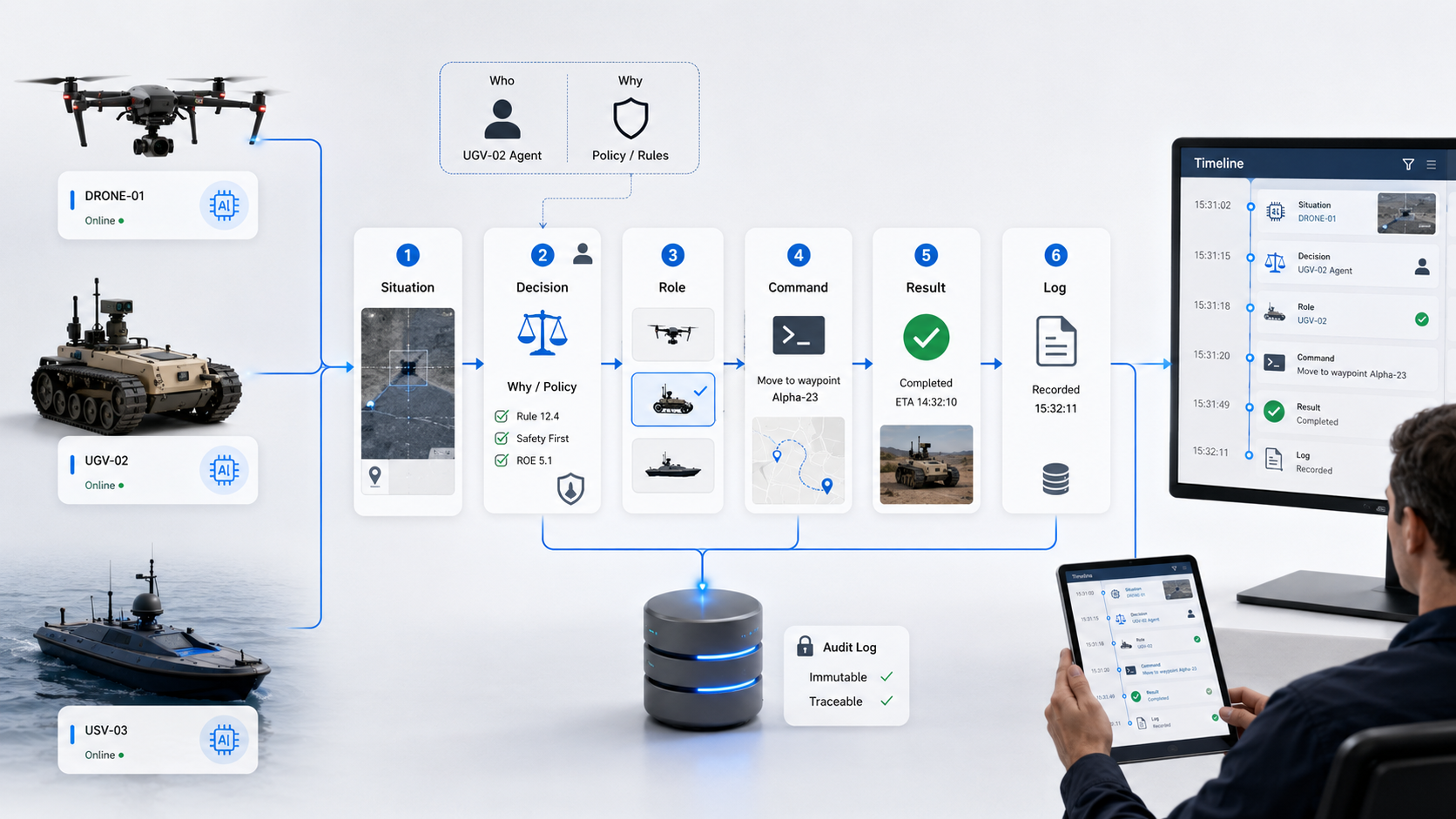
Agent decisions, mission assignments, commands, and outcomes are connected for traceability and future assessments.
CoWorld maintains a shared operating model while configuring connectivity, capabilities, and safety policies for maritime, land, and aerial devices and field conditions.
Tell us about your devices, operating environment, and problem. We will review CoWorld fit and a practical PoC scope with you.