RIVER / 01
River Anomaly Investigation
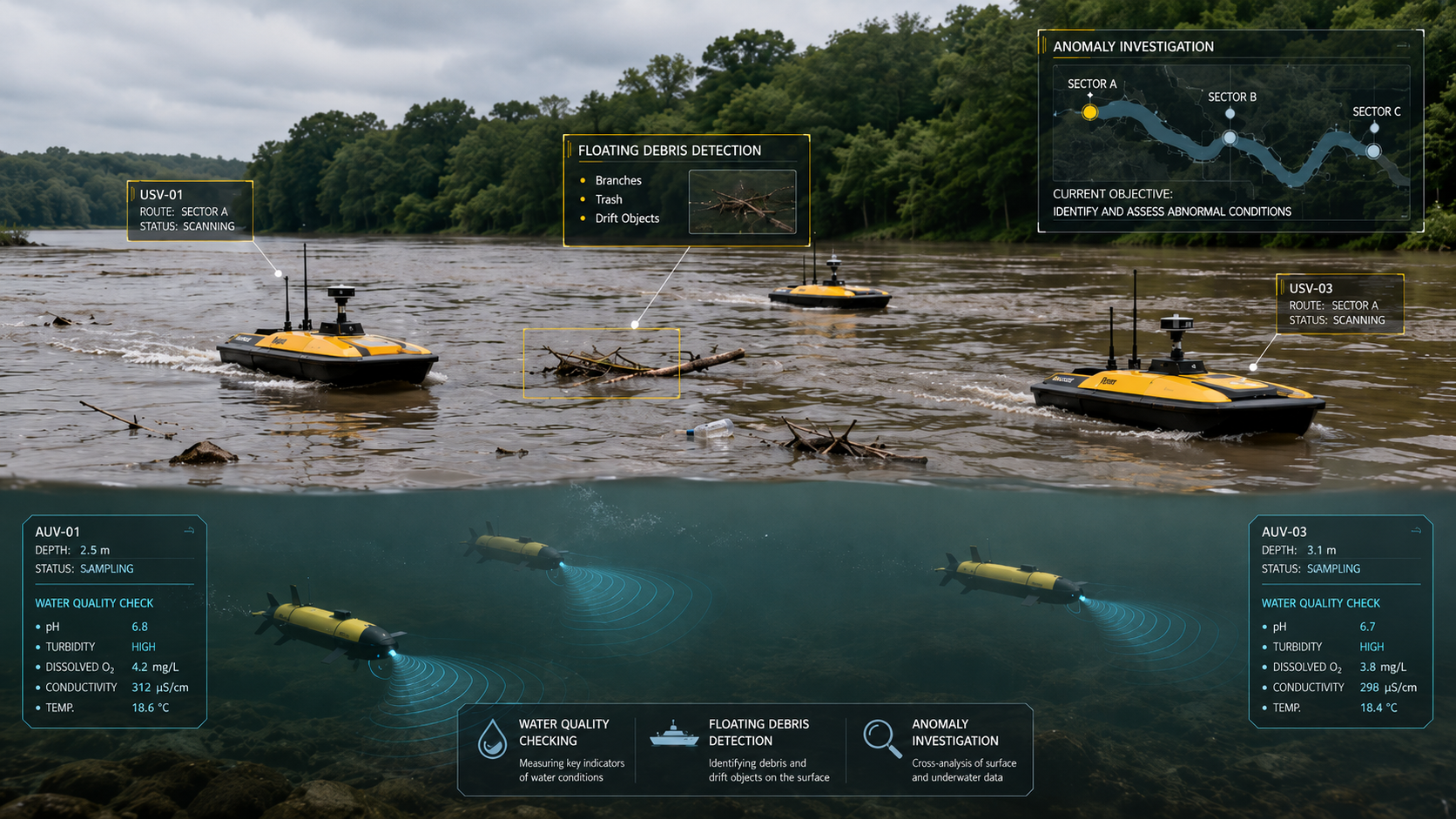
Investigate water-quality anomalies and floating debris in a defined area after heavy rainfall, then record surface and depth-profile measurements.
- 01Define survey area
- 02USV surface water-quality and debris survey
- 03AUV depth-based water-quality profiling
- 04Record and report findings
